W 1941 roku po raz pierwszy pojawiło się słowo 'Robotyka'. Użył go pisarz Issac Asimov w opowiadaniu 'Roundabout'.

Robot ELASTOR do wspomagania badań endoskopowych
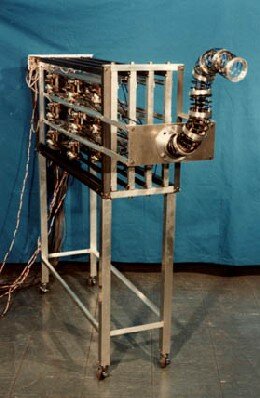
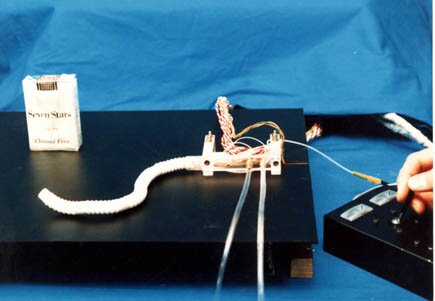
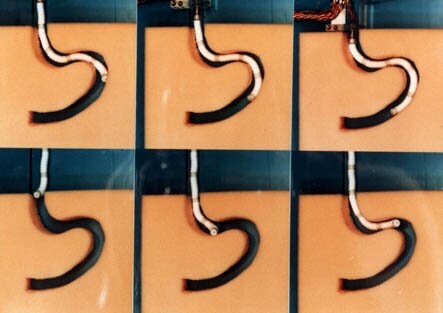
ELASTOR to prototyp robota medycznego budowanego w latach 1980-1986 w Tokyo Instite of Technology. Robot ten, wyglądem przypominający podłużną, drucianą spiralę służy do wspomagania badań endoskopowych. ELASTOR jest elastycznym, wężo-podobnym urządzeniem, dzięki któremu badanie wnętrza ludzkiego ciała stało się mniej skomplikowane i szybsze.
| Elastor | |
 |
|
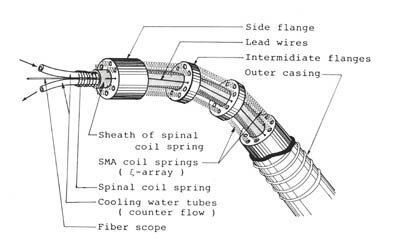
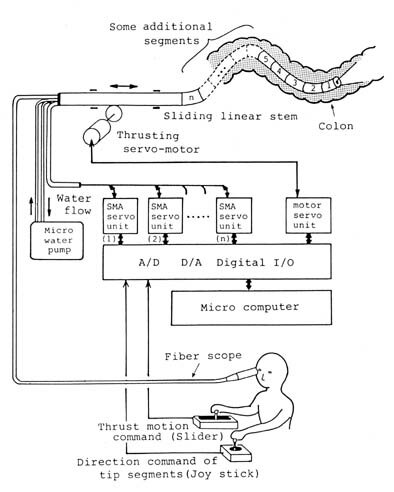
ELASTOR składa się z kilku segmentów, z których każdy zbudowany jest ze sprężyny śrubowej wewnątrz której umieszczono 3 kanały kablowe, służące do wyginania poszczególnych segmentów. Cały robot składa się z 8 segmentów, napędzanych w sumie przez 24 kanały kablowe (przewody) połączone z serwonapędem. Segmenty są elastyczne, dzięki czemu, gdy napotkają na przeszkodę, odkształcają się, nie naruszając napotkanego obiektu. Dodatkowy system bezpieczeństwa stanowi specjalny mechanim kompensacyjny, który został zaimplementowany w robocie w celu redukcji sił rozciągających, generowanych przez przewody.
Docelowo zwykłe przewody napędzające sprężyny śrubowe zostały zastąpione przewodami wykonanymi ze stopów z pamięcią kształtu (shape memory alloys) TiNi. Dzięki temu, urządzenie może być sprawnie prowadzone przez pozwijane przejścia, co czyni je użytecznym np. podczas badań endoskopowych.
Średnica robota wynosi 13 mm, jego całkowita długość to 250 mm.
źródło: Tokyo Institute of Technology
ostatnia aktualizacja: 2010

 Strona Tokyo Institute of Technology
Strona Tokyo Institute of Technology