Japoński robot humanoidalny Speecys-FC jest pierwszym robotem na świecie, napędzanym ogniwami paliwowymi. Urządzenie pobiera 1 litr wodoru na każde 2 minuty aktywności.

Mechatroniczna wersja karalucha
Robo-karaluch jest mechaniczną wersją karalucha, opracowaną na amerykańskim Johns Hopkins University przez Noah Cowana. W odróżnieniu od innych robotów mobilnych, robo-karaluch do nawigacji nie wykorzystuje kamer ani sonaru. Jest za to wyposażony w specjalną antenę, która "czuje" obiekty dotykane podczas ruchu robota - w ten sposób imitując sposób poruszania się prawdziwych karaluchów.
| Robot - karaluch |
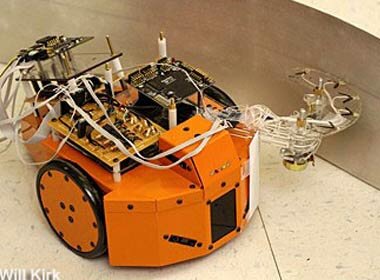 |
Zdaniem konstruktora robo-karalucha - Noah Cowana - ten sposób nawigacji szczególnie dobrze sprawdza się w ciemnych pomieszczeniach i przy różnych powierzchniach. Kluczowym elementem robota jest elastyczna antena znajdująca się z boku konstrukcji. Antena ta pracuje jak czujnik, który w momencie wykrycia przeszkody przekazuje sygnał do mikrokontrolera, który steruje całym robotem.
Antena jest wykonana z odlewu poliuretanowego i elastycznej substancji przypominającej gumę, schowanych w przezroczystej, plastikowej osłonie. Wewnątrz tworzywa poliuretanowego umieszczonych zostało 6 czujników tensometrycznych, które charakteryzują się tym, że gdy są zginane, zmieniają rezystancję.
Czujniki tensometryczne zostały tak skalibrowane, że wartość napięcia na wyjściu odpowiada konkretnym wartościom kąta zgięcia czujników, które zachodzą podczas kontaktu anteny z przeszkodą, np. ze ścianą lub innym obiektem.
Informacje generowane przez czujniki tensometryczne są przesyłane do centralnego kontrolera, sterującego ruchem całego robota.
źródło: Johns Hopkins University
ostatnia aktualizacja: 2010

 Strona Johns Hopkins University
Strona Johns Hopkins University