Test Turinga jest rodzajem testu pozwalającego określić czy maszyna posiadła zdolność myślenia. Po raz pierwszy został opublikowany w 1950 roku.

Superprecyzyjny robot do mikromanipulacji wewnątrzkomórkowych
Naukowcy z krakowskiej Akademii Górniczo-Hutniczej zbudowali jednego z najbardziej precyzyjnych robotów na świecie. Jest tak dokładny, że można nim manipulować w ludzkich i zwierzęcych komórkach nerwowych.
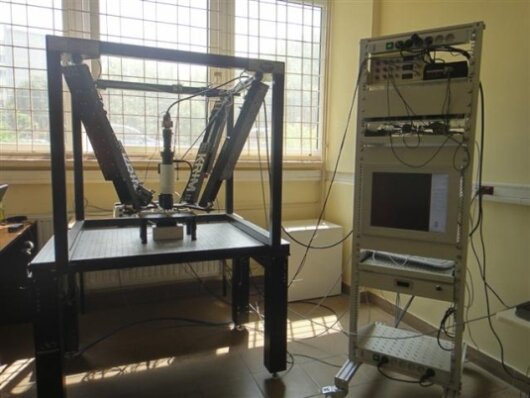
Projektowanie i budowa urządzenia trwały ponad 3 lata - zostały zakończone w 2010 roku. Robot jest hybrydą. Składa się z dwóch częci: makro i mikro robota. Całość przypomina czteronożnego pająka. Część makro ma za zadanie odnaleźć badaną komórkę, cześć mikro - zakończona igłą - przystosowana jest do manipulacji wewnątrz komórki. Urządzenie sterowane komputerowo zajmuje powierzchnię około 3 m2 i jest bardzo ciężkie. Dzięki temu jest odporne na wstrząsy, a jego ruchy mogą być wolne i precyzyjne.
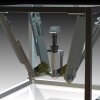
| Superprecyzyjny robot z AGH |
|
|
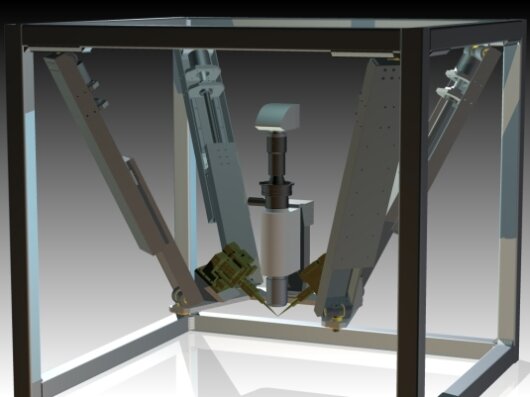 |
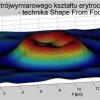
Robot jest wyposażony w systemy wizyjne pracujące jako źródło sprzężenia zwrotnego dla sterowania urządzeniem. Robot składa się z równoległego makromanipulatora o czterech stopniach swobody, z zamocowanym na nim mikromanipulatorem szeregowym o trzech stopniach swobody, z elastycznymi przegubami złączowymi, napędzanym napędami piezoelektrycznymi, który przemieszcza precyzyjnie narzędzia, oraz kamery z makroskopowym układem optycznym o dużym powiększeniu. Dzięki zastosowaniu unikalnego algorytmu przetwarzania obrazów możliwe jest odtworzenie informacji o trzecim wymiarze, pewne przemieszczanie narzędzia w okolicy i w obrębie komórki oraz długoczasowa stabilizacja względnego położenia komórki i narzędzia.
Rozdzielne w czasie wykonywanie operacji w skali makro i mikro pozwoliło na eliminację drgań i zakłóceń elektromagnetycznych pochodzących od makromanipulatora, którego silniki są wyłączone w trakcie mikromanipulacji. Zastosowanie makromanipulatora równoległego pozwala na łatwy i swobodny wybór obszaru tkanki, w którym przeprowadzane są eksperymenty oraz dużo łatwiejszy, niż w istniejących rozwiązaniach, wymianę i obsługę narzędzi i preparatu biologicznego. Wykorzystanie makroskopowego układu optycznego zwiększyło o rząd wielkości odległość obiektywu od preparatu, pozostawiając dużą przestrzeń do manipulacji. Podstawa (rama) makromanipulatora pozwala na zabudowanie na niej klatki Faradaya.
Konstrukcja robota jest zaprojektowana w ten sposób, aby umożliwić, po dodaniu drugiego mikromanipulatora, przeprowadzanie nim eksperymentów biologicznych, takich jak np. badania nad zachowaniem komórek hodowanych in vitro po dokomórkowej iniekcji substancji stymulujących i inhibujących ich rozwój. Wymaga to zlokalizowania odpowiedniej komórki w roztworze, przy czym obszar poszukiwań odpowiedniej komórki przekracza znacznie przestrzeń właściwej manipulacji i pole widzenia nieruchomego mikroskopu. Następnie zlokalizowaną komórkę chwyta się jedną mikropipetą w celu unieruchomienia, a drugą mikropipetą, przez którą wykonywana jest iniekcja, precyzyjnie przebija się przez błonę komórkową tak, aby jak najmniej ją uszkodzić, a po iniekcji precyzyjnie wycofuje. Metodą tą można również dokonywać wymiany wybranych elementów wnętrza komórki, np. jądra czy cytoplazmy, co ma zastosowanie m.in. w inżynierii genetycznej i sztucznym zapłodnieniu.
Robot równoległy o nowatorskiej strukturze kinematycznej charakteryzuje się istnieniem analitycznego rozwiązania zadania prostego i odwrotnego kinematyki, wysoką dokładnością i rozdzielczością pozycjonowania, niskim poziomem generowanych zakłóceń elektromagnetycznych oraz dobrym tłumieniem drgań. Oryginalna konstrukcja mikrorobota zapewnia wysoką precyzję ruchów w stosunkowo dużej przestrzeni roboczej oraz bardzo dobre tłumienie drgań. Dla obydwu robotów opracowano generatory trajektorii oraz sterowanie, zapewniające wymaganą dokładność śledzenia trajektorii oraz pozycjonowania. Informacja o wzajemnym położeniu narzędzia i obiektu manipulacji (komórki) dostarczana jest przez system optyczny, w skład którego wchodzi makroskopowy tor optyczny o sterowanych parametrach, kamera o wysokiej rozdzielczości, system oświetlenia oraz algorytmy przetwarzania i analizy obrazu.
W oparciu o opracowaną metodologię, algorytmy sterowania oraz przetwarzania obrazów zostały zaimplementowane w układzie FPGA, co pozwala na wykonywanie przetwarzania i realizację sterowania w czasie rzeczywistym. Robot wyposażony jest w dedykowany, intuicyjny interfejs człowiek-maszyna w postaci panelu operatorskiego, wyposażonego w ekran dotykowy, umożliwiający wybór operacji, modyfikację parametrów i ciągły podgląd przeprowadzanych manipulacji poprzez wyświetlanie przetworzonego obrazu z kamery.
Według profesora Tadeusza Uhla, kierownika katedry Robotyki i Mechatroniki AGH, twórcy super robota, jest to najdokładniejsze urządzenie na świecie, a jego zastosowanie to przede wszystkim medycyna molekularna. Przestrzeń robocza maszyny to kilka mikrometrów, a rozdzielczość jego ruchów to nanometry. Urządzenie zostało zaprojektowane do manipulacji wewnątrz komórek. Potrafi badać i leczyć komórki, stymulować je napięciem, nie niszcząc przy tym żywej tkanki. W przyszłości może pomóc w walce z rakiem. Robot cieszy się olbrzymim zainteresowaniem, ale by go kupić, trzeba wyłożyć kilka milionów złotych.
Wykonany w ramach projektu prototyp robota został nagrodzony złotym medalem Międzynarodowych Targów Poznańskich w 2009 roku.
W skład zespołu relizującego weszli: dr hab. inż. Maciej Petko (kierownik), dr hab. inż. Wojciech Lisowski (badania drgań), dr inż. Jarosław Bednarz (badania drgań), dr Tomasz Błasiak (zakołenia neurofizjologiczne, konsultacje merytoryczne, preparaty do badań), dr inż. Grzegorz Karpiel (układ sterowania, FPGA, konstrukcja makrorobota), dr inż. Daniel Prusak, (konstrukcja mikrorobota), dr inż. Mariusz Szwedo (system wizyjny, przetwarzanie i analiza obrazów), dr inż. Jan Targosz (wibroizolacja), mgr inż. Janusz Ochołski (układ sterowania).
Źródło: Akademia Górniczo - Hutnicza
ostatnia aktualizacja: 2012

 Katedra Robotyki i Mechatroniki AGH
Katedra Robotyki i Mechatroniki AGH

|
|

|
|

|
|
asimo.pl - polski wortal robotyki
[email protected]
2006-2018 Kraków