







W 1525 roku powstał pierwszy prawdziwy android w ludzkiej formie - zbudowany przez Niemca - Hansa Bullmanna.

Dolina niesamowitości
Dolina niesamowitości (ang. uncanny valley) określa próg realizmu w zachowaniu i wyglądzie robotów, którego przekroczenie u wielu osób wywołuje nieprzyjemne uczucia, takie jak lęk czy nawet obrzydzenie i odrazę. W uproszczeniu chodzi o to, że zazwyczaj ludzie reagują normalnie na widok maszyny typu Aibo lub WALL-E, czy szkieletu pokrytego kablami, wykonującego niezdarne ruchy. Nie wszyscy są jednak w stanie ze spokojem przyjąć widok robota przypominającego wyglądem lub zachowaniem człowieka, szczególnie jeśli jest to kopia bliska orygnałowi. Im bardziej granica między człowiekiem a maszyna zaciera się, tym poczucie dyskomfortu staje się silniejsze.

Wyrażenie to zostało wprowadzone w 1970 roku przez profesora robotyki - Masahiro Mori. Mori opisał dolinę niesamowitości jako reakcję człowieka na widok robota, który pod względem wyglądu lub zachowania jest postrzegany jako istota bardzo zbliżona do człowieka. Różnica w odczuwaniu że coś jest "prawie jak człowiek", ale nim tak naprawdę nie jest, sprawia że czujemy się nieswojo. Jest to wynikiem wyewoluowanej, specyficznej reakcji naszego mózgu na obiekty podobne do nas, szczególnie jeśli te obiekty mają antropomorficzną postać. Mori w swoim opracowaniu dotyczącym protezy ludzkiej ręki napisał, że terminologii matematycznej, dziwność może być reprezentowana jako przecząca (ujemna) znajomość, więc proteza ręki znajduje się na dnie doliny (dno oznacza wartość ujemną). Więc w tym przypadku, wygląd jest bardzo bliski człowieczemu, ale jego znajomość jest daleka - i to jest dolina niesamowitości.

Masahiro Mori przeprowadził szereg eksperymentów dotyczących emocjonalnej reakcji ludzi na wygląd zewnętrzny robotów. Początkowo rezultaty były przewidywalne: czym robot był bardziej podobny do człowieka, tym sympatyczniejszym się on wydawał - jednak tylko do określonej granicy. Roboty najbardziej zbliżone do człowieka nieoczekiwanie okazywały się niemiłe dla ludzi z powodu niewielkich szczegółów odróżniających je od człowieka. Wywoływały one uczucie dyskomfortu, a nawet strachu. Nieoczekiwany spadek na wykresie komfortu psychicznego to początek doliny niesamowitości. Mori wykrył, że ruch obiektu potęguje jego pozytywne i negatywne postrzeganie.
W 2011 roku prof. Ayse Pinar Saygin z Uniwersytetu Kalifornijskiego podjęła badania mające na celu ustalenie przyczyn występowania doliny niesamowitości. W badaniu 20 osób w wieku od 20 do 36 lat, które nie miały doświadczenia z robotami, wykorzystano funkcjonalny rezonans magnetyczny. U uczestników badania mierzono aktywność w okolicach kory ciemieniowej odpowiedzialnej za rozpoznawanie ruchów, oraz korze ruchowej sterującej ruchami zamierzonymi. W toku badań największą aktywność mózgu zaobserwowano podczas oglądania przez badanego filmów przedstawiających robota humanoidalnego. Tymczasem w przypadku filmów przedstawiających człowieka i robota nie przypominającego człowieka aktywności były na podobnym, niskim poziomie. Konkluzja badań mówi, że widok robota człowiekopodobnego powoduje u obserwatora oczekiwanie wykonania konkretnych ruchów, a wobec ich braku, brak komfortu.
Problematyka doliny niesamowitości jest również obecna w technikach produkcji filmowej, w zastosowaniu do wirtualnych aktorów, takich jak animowane postaci w filmie Final Fantasy, które osiągnęły zdumiewający realizm jako nieruchome obrazki - ale cały ten realizm natychmiast znikał w momencie gdy pojawił się ruch twarzy wirtualnej postaci. Ze względu na ograniczenia technologiczne, nie udało się odtworzyć naturalnej mimiki i subtelnych, niewielkich ruchów ciała i twarzy - ruchów, które są niezwykle ważnym elementem komunikacji międzyludzkiej w prawdziwym świecie. Bez tych ruchów, widzowie od razu zauważają, że "coś jest nie tak" i natychmiast są wprowadzani do doliny niesamowitości.
Kolejny problem z wirtualnymi postaciami stanowi fakt, iż nie mają one masy, ani nie podlegają żadnym siłom. Przy wykonaniu animacji komputerowych, wykonywane są prace które są odwrotnością kinematyki. Innymi słowy, siła nie jest nieodłącznym elementem fizyczności postaci, ale jest zewnętrznie dopasowywana w taki sposób, aby ruchy postaci były jak najbliższe naturalnym, typowym dla ludzi. Taka technika doskonale sprawdza się, gdy tworzone są postaci, które z założenia nie są wiernymi kopiami ludzi, tak jak to miało miejsce w przypadku "tubylców" w filmie Avatar. Kiedy jednak próbujemy stworzyć wirtualne postaci mające idealnie imitować ludzi, cała iluzja znika - wystarczy jeden nienaturalny tik w twarzy, który poinformuje nas, że mamy do czynienia ze sztucznym bytem. W tym punkcie dochodzi do gwałtownego załamania krzywej sympatii. Sprawa jest tym bardziej skomplikowana, że ludzie w drodze ewolucji nabyli pewne umiejętności, które ich mechaniczne lub wirtualne odpowiedniki nie mają, np. umiejętność odgadywania czy dana osoba kłamie - na podstawie mimiki twarzy, gestów czy sygnałów tonalnych, których nie zawsze jesteśmy w pełni świadomi, ale które odbieramy zmysłami - zarówno jako osoba która kłamie, jak i osoba która jest okłamywana. Kiedy ta mimika twarzy, gesty i sygnały tonalne znikają, pojawia się dolina niesamowitości.
| Robot CB2 imitujący małe dziecko |
| Lalka przypominająca dziecko |
| Fembot |
| Fembot |
| Fembot |
| Final Fantasy |
| Heavy Rain |
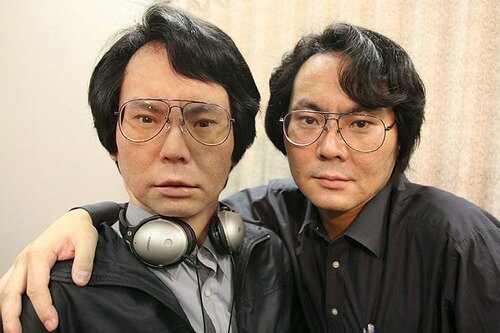 |
| Hiroshi Ishiguro z repliką jego samego |
| Polar Express |
 |
| Repliee Q2 |
| Głowa robota |
| Komputerowo wygenerowane zdjęcie koreańskiej aktorki Song Hye Kyo |
 Artykuł Dlaczego boimy się androidów
Artykuł Dlaczego boimy się androidów
Artykuł Robotyka społeczna - poza doliną niesamowitości
asimo.pl - polski wortal robotyki
[email protected]
2006-2015 Kraków