







w 2011 roku Google opatentował system tzw. 'autokierowcy'. Pozwala on na przełączenie samochodu w tryb automatyczny, który do kierowania pojazdem nie potrzebuje ingerencji ze strony kierowcy.

Para kinematyczna
Para kinematyczna to połączenie ruchowe dwóch członów mechanizmu. Para kinematyczna odbiera część stopni swobody członom przez nią związanym.
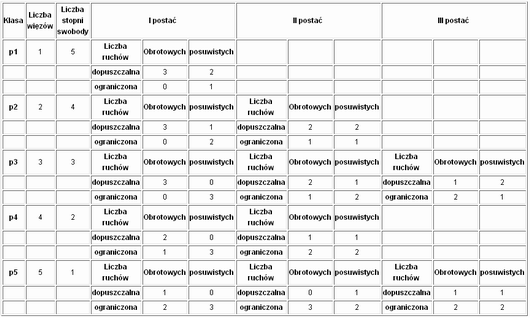
Pary kinematyczne dzieli się na klasy w zależności od ilości więzów (dobranych stopni swobody) oraz w zależności od tego jakie rodzaju ruchu są przez parę dopuszczane lub ograniczane. W zależności od liczby ograniczeń więzów wyróżnia się 5 klas połączeń członów, czyli pary kinematyczne od I do V klasy.

W obecnie konstruowanych robotach przemysłowych znaczenie techniczne mają głównie połączenia członów V klasy, a więc pary o wzajemnym ruchu obrotowym lub liniowym.
Klasyfikacja par kinematycznych:


asimo.pl - polski wortal robotyki
[email protected]
2006-2015 Kraków