







Po arabskim embargo naftowym z 1973 roku, liczba robotów ROV (Remotly Operated Vehicles) obsługujących sektor podwodnego wydobycia ropy wzrosła z zaledwie 3 sztuk do 700.

Człon proporcjonalny
W automatyce człon proporcjonalny P (bezinercyjny, wzmacniający) (ang. proportional term) to człon, który na wyjściu daje sygnał y(t) proporcjonalny do sygnału wejściowego x(t):

Parametr k nazywa się współczynnikiem wzmocnienia nawet wtedy, gdy współczynnik ten jest mniejszy od 1, czyli następuje nie wzmocnienie, lecz osłabienie działania.

Dla określenia wartości wzmocnienia k potrzebne jest równanie matematyczne, określające zależność pomiędzy wielkością wyjściową y(t) i wielkość wejściową x(t). Jeśli ta zależność jest nieznana, mozna określić wartość k na podstawie znajomości charakterystyki statycznej lub za pomocą eksperymentu.
Poddanie powyższego związku obustronnej transformacji Laplace'a daje związek pomiędzy transformatami obu sygnałów:

Stąd transmitancja członu proporcjonalnego ma postać:

gdzie stała k jest współczynnikiem wzmocnienia.
Odpowiedź impulsowa:

Charakterystyka skokowa członu proporcjonalnego wynosi:
- w dziedzinie operatorowej
- w dziedzinie czasu

Charakterystyka amplitudowo-fazowa:
przyjmując otrzymujemy:

Charakterystyka fazowa:

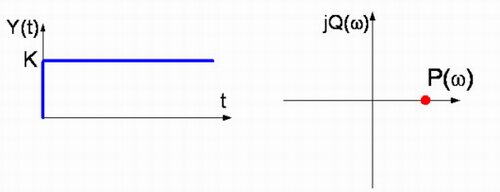
Odpowiedź na skok jednostkowy i charakterystyka amplitudowo - fazowa członu proporcjonalnego:
Przykładami członów proporcjonalnych są: przekładnie zmieniające liczbę obrotów, przekładnie zmieniające moment napędowy, wzmacniacze elektroniczne oraz większość czujników - przetworników pomiarowych.
 Charakterystyka amplitudowo - fazowa
Charakterystyka amplitudowo - fazowa 
Podstawowe człony dynamiczne (309 kB) 
asimo.pl - polski wortal robotyki
[email protected]
2006-2015 Kraków