







Demonstracja pierwszego mikroprocesora w Stanach Zjednoczonych miała miejsce w 1971 roku.

Człon różniczkujący
W automatyce człon różniczkujący D (idealny) (ang. derivative term) to człon, który na wyjściu daje sygnał y(t) proporcjonalny do pochodnej sygnału wejściowego x(t):
Pod pojęciem pochodnej rozumie się stromość przebiegu sygnału, jego wznoszenie. Na wymuszenie skokowe odpowiedzią członu D jest więc pojedynczy impuls w chwili początkowej wymuszenia. Dla wymuszenia liniowo narastającego, o stałym wznoszeniu, odpowiedzią członu różniczkującego jest stała wartość.

Poddanie powyższego związku obustronnej transformacji Laplace'a daje związek pomiędzy transformatami obu sygnałów:
Stąd transmitancja członu różniczkującego ma postać:
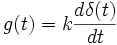
Jego odpowiedź impulsowa wygląda następująco:
Charakterystyka skokowa:
- w dziedzinie operatorowej

- w dziedzinie czasu
Charakterystyka amplitudowo-fazowa:
Charakterystyka fazowa:

Odpowiedź na skok jednostkowy i charakterystyka amplitudowo - fazowa członu różniczkującego:
Człony różniczkujące są wykorzystywane, np. w postaci wzmacniaczy operacyjnych, do przekształcania sygnałów analogowych generowanych przez różnego rodzaju czujniki. Przykładowo, jeżeli czujnik generuje sygnał o wartości proporcjonalnej do mierzonego przemieszczenia, to człon różniczkujący dostarczy sygnał o wartości proporcjonalnej do prędkości ruchu, czyli vx = dx/dt.
Człony różniczkujące wzmacniają sygnały o wysokich częstotliwościach.
 Charakterystyka amplitudowo - fazowa
Charakterystyka amplitudowo - fazowa 
Podstawowe człony dynamiczne (309 kB) 
asimo.pl - polski wortal robotyki
[email protected]
2006-2015 Kraków